


汽车头条App

汽车头条公众号

当前位置: 首页 正文
 用手机看
用手机看

手机扫码看

虽然对端到端成为今年霸榜营销热词有强烈的预感,但还是没有料到各大厂家会在宣传上加那么大杠杆。
说起来,端到端绝对不是上下嘴皮子一翻就能实现的,而是需要满足很多前置条件。
01
胖子不是一天吃成的,端到端也不是一天实现的。
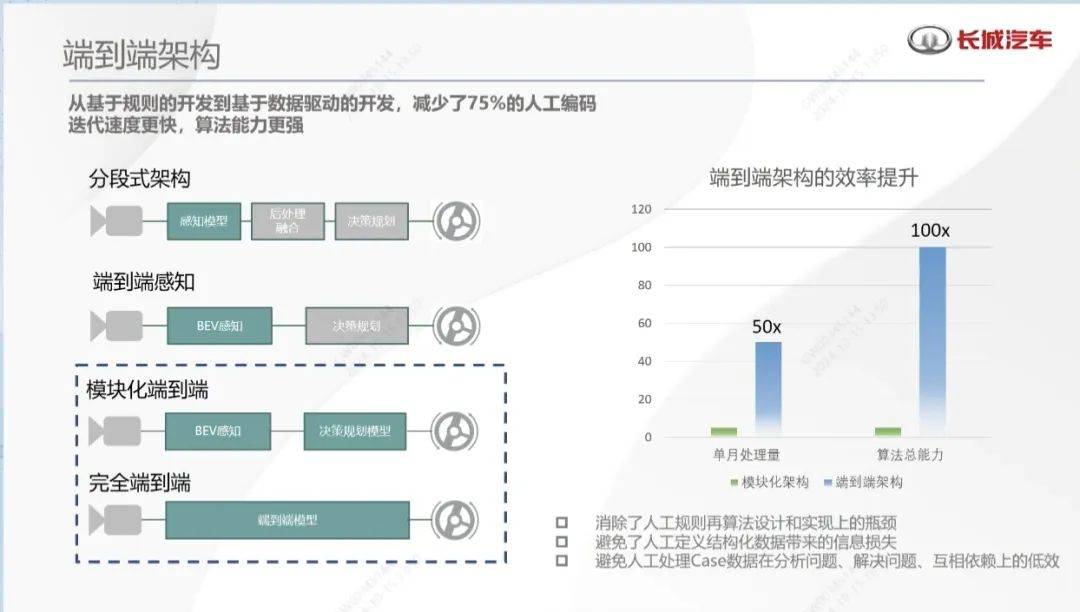
要实现终极的一段式端到端,需要经历四大阶段。
对这四个阶段的阐述,根据自家算法的发展史,不同的玩家会有不同的观点。
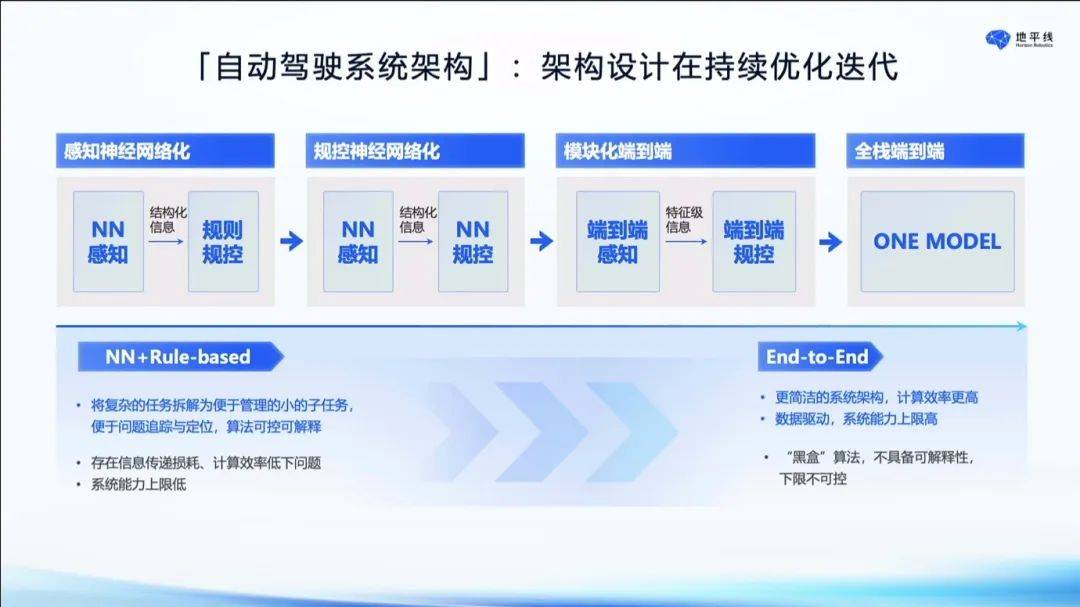
从地平线的自动驾驶算法架构迭代历程来看:
第一阶段,实现感知层神经网络化,决策规划层基于规则+算法实现。
第二阶段,实现决策规划层神经网络化,将决策规划的规则驱动进化为数据驱动。
第三阶段,以基于Transformer的BEV大模型替代神经网络化感知层中的多个小模型,实现感知的端到端。
同样基于Transformer将神经网络化的决策规划层进化为端到端规划,端到端感知和端到端规划之间传递特征级信息,实现分段式端到端。
在这里有必要提一点,神经网络化并不等同于端到端,它是端到端的必要条件而非充分条件。
第四阶段,消除端到端感知和端到端决策规划的界限,实现全程可导,进化为一段式端到端。
虽然各家的划分方式有些微的不同,但万变不离其宗。
相较传统的分模块方案,端到端的核心改变在于决策规划层面。
——即原来基于人工编码实现、规则驱动的决策规划转向了基于神经网络学习实现、数据驱动的决策规划。
特斯拉能够在2022年底一下子转向端到端,就是因为它率先实现了决策规划层的神经网络化,做足了转型的预热。
彼时,国内智驾头部玩家依然对将神经网络全面用于安全要求极高的决策规则持怀疑态度。
虽然也在探索在规划层使用深度学习算法,但转型并不坚决,依然以规则为主。
由规则编码转向神经网络是一个颇为浩大的工程,需要消耗一定的时间。
基于此,奇瑞自动驾驶负责人谷俊丽才说国内厂商落后特斯拉1.5-2年。
看到这里,大家就不会再喷谷俊丽了吧?
02
国外的月亮不一定比国内圆,但是外来的和尚有时候就是会念经。
由于引领自动驾驶技术路线向端到端范式转变,特斯拉在自动驾驶领域的声望达到了顶峰。
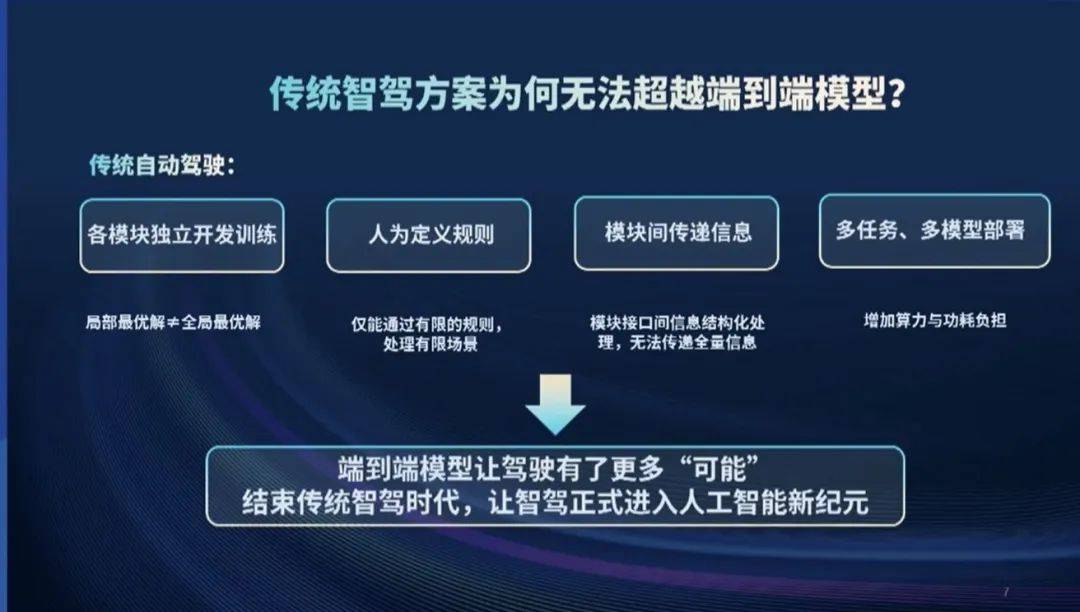
特斯拉和端到端范式之所以被大家夸成了一朵花,主要是因为规则驱动的分模块方案无法高效地收敛层出不穷的长尾场景。
——在基于规则实现的系统中,要解决的场景越多,要编写的代码就越多,就越难以开发、测试和维护。
而且,自动驾驶系统性能迭代的进程是不断覆盖各种长尾场景的过程,在规则驱动的范式下,解决了新的长尾,又有可能会激活老的长尾。
系统进三步,退两步,还怎么迈向全无人驾驶的珠穆朗玛呢?
端到端范式依靠数据驱动解决了“吾生也有涯,而长尾场景无涯”的问题。
依靠深度学习神经网络的记忆能力解决了“按下葫芦浮起瓢”的问题。
无论是海量数据驱动还是具备长期记忆能力的深度学习,背后都特别考验数据采集、处理、标注、模型训练、模型验证评估、OTA部署这一条数据闭环。
这也意味着,只有那些早早布局数据闭环建设的智驾厂商才能在当下的端到端初期阶段吃到最大红利。

在这波端到端范式火起来之前,华为、特斯拉、小鹏、蔚来、Momenta这些头部智驾厂商的感知层大都实现了端到端,即实现了动态BEV网络、静态BEV网络和占用网络的三网合一。
所缺者,唯规划层的神经网络化,实现端到端感知的过程离不开自动化程度不断提升的数据闭环。
所以,这些头部智驾厂商的端到端宣传还是比较靠谱的。

至于某些两年前才开始布局自动驾驶业务的新势力车企,无论是智驾数据的积累还是数据闭环的建设都处于初期阶段,其自动驾驶第一阵营的宣传和端到端大模型的宣传都颇为存疑。
03
或许是因为竞争太激烈的缘故,国内车企在自动驾驶领域的宣传特别离谱,个个都要在年内实现全国都能开,家家都是第一梯队。
具体到端到端上面,尽管需要那么多的前提条件,各家还是不甘落后地纷纷“推出”了真假难辨的端到端方案。
不过,在这些挑拨人们的神经的宣传面前,大家一定要擦亮眼,冷静地意识到,绝大部分厂商的端到端方案尚处于初级阶段,还需要经过较长一段时间的雕琢。
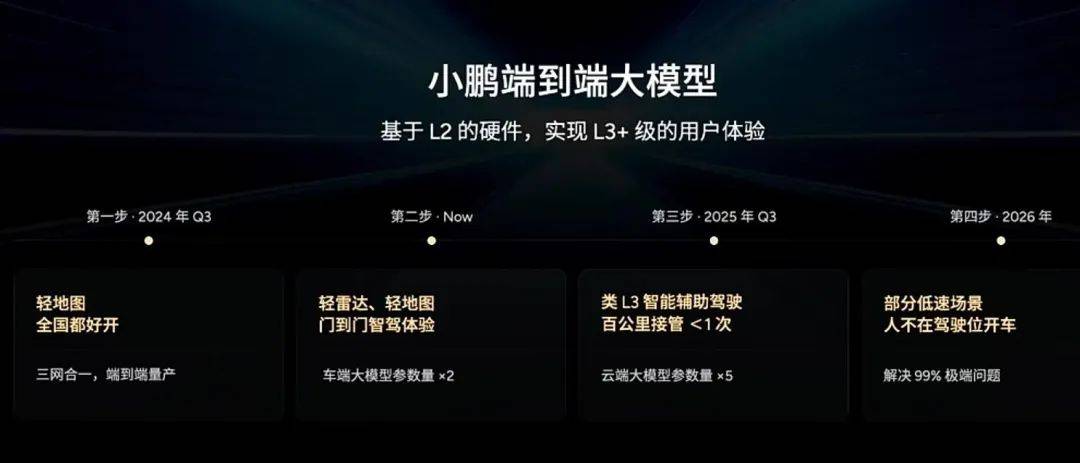
小鹏汽车8月底小鹏Mona 03上市发布会上提出了端到端四部曲:
第一步,实现三网合一,端到端量产;
第二步,车端大模型参数量翻倍;
第三步,云端大模型参数量提升5倍;
第四步,解决99%极端问题。
第一步里的三网合一不同于端到端感知中的动态BEV网络、静态BEV网络、占用网络的三网合一。
是特指将分段式端到端方案中的大语言模型XBrain、端到端感知大模型XNet、端到端规划大模型XPlanner合并成一张大网,实现一段式端到端方案。
从时间线上来看,小鹏5月20号AI Day上宣布量产上车的端到端方案并非OneModel端到端。

第二步里的车端大模型参数量翻倍,是指将一段式端到端方案中的许多小模型合并成少数几个大模型,通过计算资源的集约,在硬件算力、存储资源都不变的情况下提升大模型的参数规模。
换句话说,从24年Q3到24年底之间,小鹏汽车的一段式端到端大模型中依然存在不少小模型和中模型。
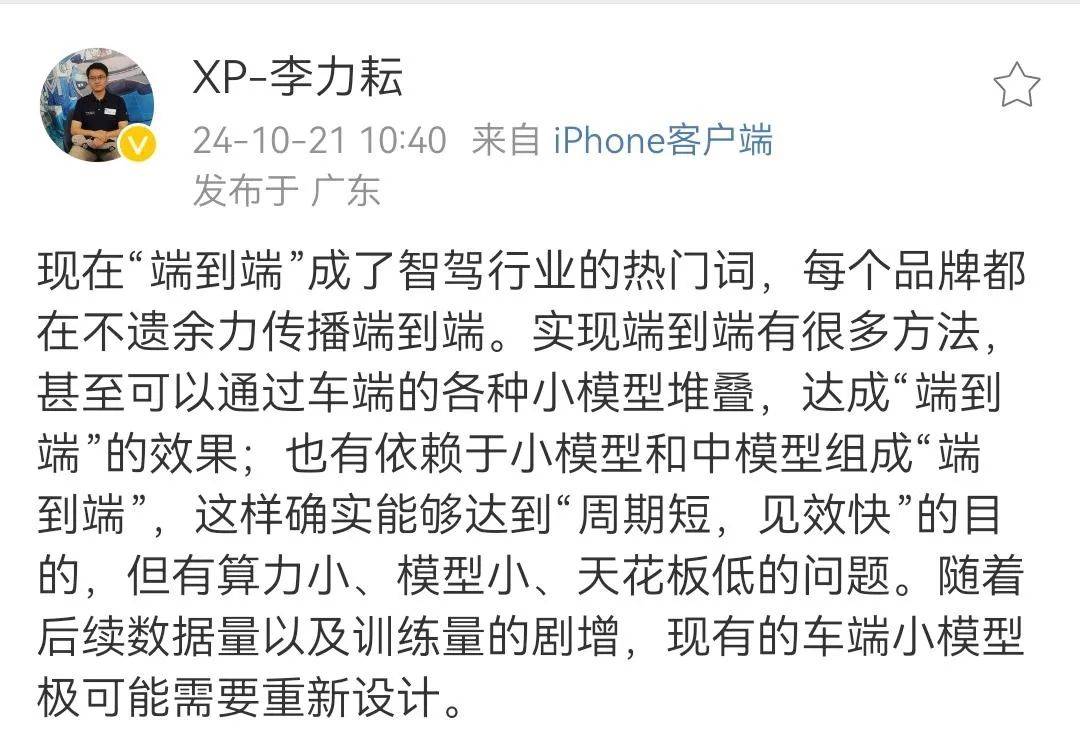
小模型的说法来自小鹏自动驾驶负责人李力耘,他的表态一方面揭露了半年前的小鹏端到端大模型“即非端到端,是名端到端”的实际。
一方面也表明,很多车企只不过是在车端把各种小模型堆叠在了一起,揉成了一个四不像的“端到端”。
在2024年的电动汽车百人会上,长城汽车旗下自动驾驶算法公司毫末智行CEO顾维灏发表了一个观点:国内车企向端到端范式的转变需要经历几年的时间。
顾维灏说的端范式应该指的是技术成熟阶段,现在端到端还处在初级阶段,乾坤未定,你我皆黑马。
这也是传统大厂难得的智驾窗口期,快人一小步,就能领先一大截。
是新势力更快,还是老法师更快,让子弹飞一会,我们一定会有答案。

评论 0
作者信息
更多资讯推荐







